Heading into Week 9, we have a mechanically and electronically complete model solar vehicle. We would say it's fully complete, but it's missing one component that's required for the competition and aesthetics: the side panels. Besides that, however, the car has been tested with the motor and solar panel attached and it is fully functional. The weather forecast for the day of the competition is predicted to be rather cloudy with a chance of thunderstorms. So, we decided to use the larger motor that seemed to generate greater torque but also had less sensitivity to the sun. We figured that if it's sunny enough, we'll have an altogether faster car, but if the forecast holds up, we'll be forced to use the AA battery pack that we recently purchased anyway.
There weren't really any "problems" with the car when it was tested. There were a few, small errors that can be easily adjusted, however. For example, one of the front wheels would not securely remain attached to the axle, so we simply super-glued it on. Also, the larger motor did not come with a mounting bracket as the first, smaller one did. The piece of sticky foam that came with the larger motor does not securely hold it in place which causes the gear transmission to fall out of place as well. Therefore, the motor too will most likely be glued in place to prevent its gear from becoming disconnected from the axle gear. This way, we can prevent any unnecessary loss of torque. Finally, as a point of reference, we would like to mention that in order to make the car go forward, the black wire must be attached to the front lead of the motor.
All in all, the entire project itself was a success regardless of the results of the upcoming race. We've managed to model, design, and construct a very simple, miniature solar vehicle that harnesses the sun's energy and transform it into mechanical energy through the motor and wheels. Now, all we have to do is hope it's good enough for the upcoming race.
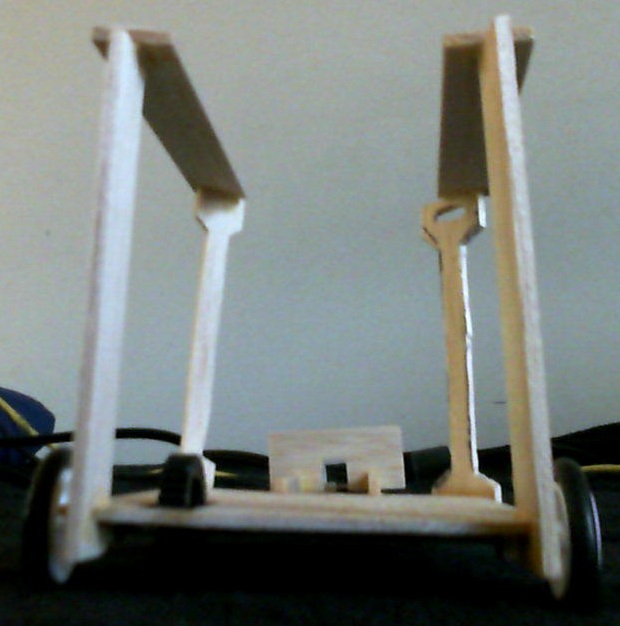
Below are simply more images of our solar car, but in its nearly final form with the motor and solar panel fully attached to each other and the car.
 |
| Figure 1: Solar car with motor and panel, front view. [1] |
 |
| Figure 2: Solar car with motor and panel, left side view. [2] |
 |
| Figure 3: Solar car with motor and panel, right side view. [3] |