Meanwhile, three quantitative, graphical models have been made to represent our numerical, mechanical and electrical data. The first graph, Figure 1, displays the electrical current being drawn by the solar panel as a function of the voltage. The maximum current possible (when voltage = 0) is about 1.5A while the maximum voltage (at zero current) is about 3V.
 |
| Figure 1: Current drawn from the solar panel as a function of voltage. This graph models the general power output of the single solar panel being used. [1]
Figure 2 is a graph consisting of two y-axes because it is displaying both rotational velocity and current as functions of torque. An analysis of the plot shows that as torque increases, current being drawn also increases while rotational velocity decreases (both at linear rates).
|
 |
| Figure 2: Rotational velocity and current as functions of torque with the linear equations for each value. [2] |
Finally, Figure 3 displays two functions as well: torque and rotational velocity as functions of the gear ratio. The velocity graph appears to be a vertical line only because its y-values are much greater than those of the torque plot. The velocity plot is actually decreasing exponentially and approaches zero as gear ratio increases. Obviously, both torque and rotational velocity must be maximized. Therefore, there must be an optimal gear ratio that satisfies both conditions. Analyzing the graph shows that this "sweet spot" occurs at about 5.5 meaning that a gear ratio of about 5 or 6 would be preferable.
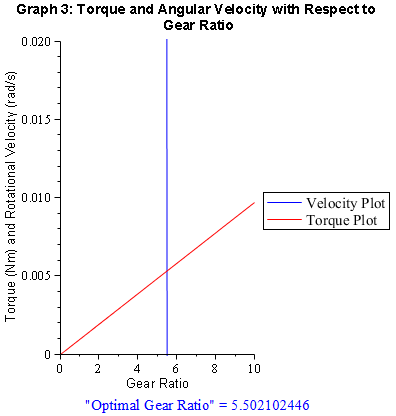 |
| Figure 3: Torque and rotational velocity as functions of gear ratio. Gear ratio is defined as the diameter of the axle gear divided by the diameter of the motor gear and is expected to be a value greater than one. [3] |
No comments:
Post a Comment